Haptics Researcher | Imperial College London | Massachusetts Institute of Technology
Imperial College London
Exhibition Road,
London, United Kingdom
I’m an Independent Research Fellow in the Hamlyn Centre for Robotic Surgery at Imperial College London where I work at the intersection of robotics, human-computer interaction and medicine. My primary research interest is in haptics though my past research has covered topics including digital manufacturing, personalised medical devices, robotics for muscular rehabilitation and information visualisation. I am currently working on haptic simulations of physical medical examinations which will be deployed to support Imperial’s MBBS in Medicine curriculum.
I first joined Imperial as an undergraduate student in the Department of Electrical and Electronic Engineering in 2014, before returning as a researcher in Bioengineering in 2020 and Research Associate (postdoc) with the Department of Surgery and Cancer as part of the Centre for Engagement and Simulation Science and SiMMS research group. I am currently a Research Fellow in the Hamlyn Centre for Robotic Surgery. I completed my PhD in Haptics at Queen Mary University of London and have been a visiting researcher at York University in Canada and Seoul National University in South Korea. I currently hold a Visiting Scholar appointment in the Department of Mechanical Engineering at MIT, am a member of the London Institute for Healthcare Engineering, and am Chief Engineer and co-founder of Human Robotix Ltd.
It was fantastic to co-organise the first UK workshop sensorimmotor research with Ildar Farkhatdinov, Etienne Burdet and Tom Arichi. Amazing talks all around and such fun to see all the plans come to life!
Oct 02, 2025
It was great to present a guest lecture on CAD and CAM in medicine to MSc Advanced Medical Robotics students at King’s College London.
Sep 18, 2025
I’m thrilled to recieve funding from the Pro2 Network+ to support the development of an open-source toolkit for soft haptics research, in collaboration with Dr Lynette Jones and the Cutaneous Sensory Lab at MIT!
Sep 15, 2025
Honored to recieve the Best Poster award at the UK-RAS annual showcase for my work on using haptics to communicate complex environmental information to ROV operators! Check out the full paper (open-access) in the Journal of Field Robotics here.
Sep 15, 2025
Enjoyed presenting my work on using haptic feedback to support ROV teleoperation in complex environments at the UK-RAS annual showcase.
The remote operation of underwater vehicles at depth is complicated by the presence of invisible and unpredictable environmental disturbances such as cross-currents. Communicating the presence of these disturbances to an operator on the surface is made more difficult by the nature of the disturbance and the lack of visible features to highlight in the visual display presented to the operator. Here we explore the use of a novel interactive soft haptic touchpad that utilizes vibration and particle jamming to provide information about the presence and direction of cross-currents to the operator of an ROV (remotely operated vehicle). An in water experiment using a thruster-based ROV and artificially generated cross-current was performed with non-expert ROV operators to evaluate the effectiveness of multimodal haptic feedback to communicate complex environmental information during high-risk operations. Advanced haptic displays can signal both the presence of external factors as well as their direction, information that can enhance operational performance as well as reduce operator cognitive load. Using haptic feedback resulted in a statistically significant reduction in cognitive load of 24.3% and increase in positioning accuracy of 28.3% for novice operators. Deviation from an ideal path was also reduced by 29.5% for experienced operators when using haptic feedback compared to without. While this experiment took place in controlled conditions with a fixed direction cross-current and haptic interface, this approach could be extended to communicate real-time environmental information in real-world unstructured environments.
@article{Brown2025_ROVHaptics,author={Brown, Joshua and Farkhatdinov, Ildar and Jenkin, Michael},title={ROV Teleoperation in the Presence of Cross-Currents using Soft Haptics},volume={43},issn={2296-9144},url={https://onlinelibrary.wiley.com/doi/abs/10.1002/rob.22533},doi={10.1002/rob.22533},journal={The Journal of Field Robotics},publisher={Wiley},year={2025},month=feb,eprint={https://onlinelibrary.wiley.com/doi/pdf/10.1002/rob.22533},}
Design and Characterisation of Particle Jamming-Based Variable Stiffness Displays using Non-pneumatic Actuators
This paper recieved an Honorable Mention for the best conference paper award at the IEEE Haptics Symposium 2020
Particle jamming is an emergent technology widely used to create haptic devices that can change their physical stiffness to render hard or soft surfaces. Conventional implementations of particle jamming-based interfaces have relied on bulky and expensive vacuum systems to force the particles together. This paper presents designs for two alternative, mechatronic approaches to activating a particle jamming-based haptic interface. Each design is subjected to a battery of mechanical tests to evaluate the range and uniformity of the achievable hardness change and response time. Results are presented and the effectiveness of these designs is considered against established pneumatic approaches.
@inproceedings{Brown2024_nonpneumatic_jamming,author={Brown, Joshua and Bello, Fernando},city={Long Beach},doi={10.1109/HAPTICS59260.2024.10520854},isbn={979-8-3503-4511-7},issn={2324-7355},booktitle={IEEE Haptics Symposium (HAPTICS)},month=apr,pages={379-384},publisher={IEEE},title={Design and Characterisation of Particle Jamming-Based Variable Stiffness Displays using Non-pneumatic Actuators},volume={2024-April},year={2024},}
A suite of robotic solutions for nuclear waste decommissioning
Editor’s Choice articles are based on recommendations by the scientific editors of MDPI journals and aim to provide a snapshot of some of the most exciting work published in the various research areas of the journal.
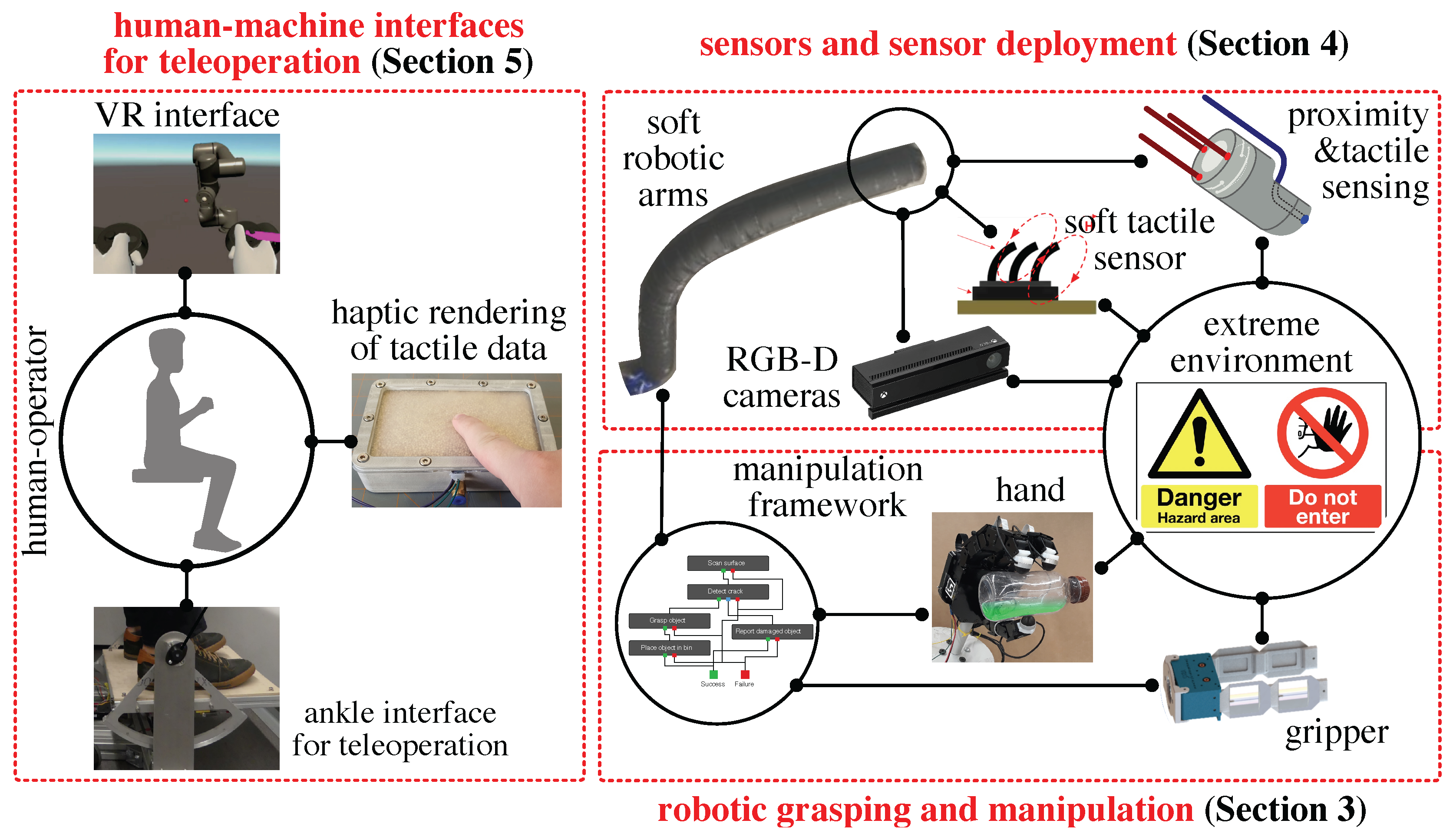
Dealing safely with nuclear waste is an imperative for the nuclear industry. Increasingly, robots are being developed to carry out complex tasks such as perceiving, grasping, cutting, and manipulating waste. Radioactive material can be sorted, and either stored safely or disposed of appropriately, entirely through the actions of remotely controlled robots. Radiological characterisation is also critical during the decommissioning of nuclear facilities. It involves the detection and labelling of radiation levels, waste materials, and contaminants, as well as determining other related parameters (e.g., thermal and chemical), with the data visualised as 3D scene models. This paper overviews work by researchers at the QMUL Centre for Advanced Robotics (ARQ), a partner in the UK EPSRC National Centre for Nuclear Robotics (NCNR), a consortium working on the development of radiation-hardened robots fit to handle nuclear waste. Three areas of nuclear-related research are covered here: human–robot interfaces for remote operations, sensor delivery, and intelligent robotic manipulation.
@article{Vitanov2021,author={Vitanov, Ivan and Farkhatdinov, Ildar and Denoun, Brice and Palermo, Francesca and Otaran, Ata and Brown, Joshua and Omarali, Bukeikhan and Abrar, Taqi and Hansard, Miles and Oh, Changjae and Poslad, Stefan and Liu, Chen and Godaba, Hareesh and Zhang, Ketao and Jamone, Lorenzo and Althoefer, Kaspar},doi={10.3390/robotics10040112},issn={22186581},issue={4},journal={Robotics},keywords={Human–robot interaction,Inspection robots,Manipulators,Nuclear robots,Teleoperated robots,Vision and perception},month=dec,publisher={MDPI},title={A suite of robotic solutions for nuclear waste decommissioning},volume={10},year={2021},}
Soft Haptic Interface based on Vibration and Particle Jamming
This paper was a finalist for the best conference paper award at the IEEE Haptics Symposium 2020
Whilst common in devices ranging from smart-phones to game controllers, vibrotactile feedback has generally been limited to providing a uniform sensation across a tactile surface. We propose a haptic interface based on the emerging physical effect of particle jamming with both vibrotactile and shape changing outputs, which can be extended in space to create haptic surfaces and devices with shape and vibrotactile responses localised to one part of the device. This paper gives an overview of the physical principles behind this technology and presents detailed performance metrics obtained from a working prototype. These include experimental characterization of the relationships between air pressure and electric motor power and vibration amplitude and frequency which show that it is possible to control vibrotactile amplitude and frequency independently.
@inproceedings{Brown2020_Soft_Haptic_Interface_Based_On_Vibration,author={Brown, Joshua and Farkhatdinov, Ildar},city={Washington DC},doi={10.1109/HAPTICS45997.2020.ras.HAP20.8.0698f2bb},isbn={9781728102344},issn={23247355},booktitle={IEEE Haptics Symposium (HAPTICS)},month=mar,pages={1-6},publisher={IEEE},title={Soft Haptic Interface based on Vibration and Particle Jamming},volume={2020-March},year={2020},}